News Message
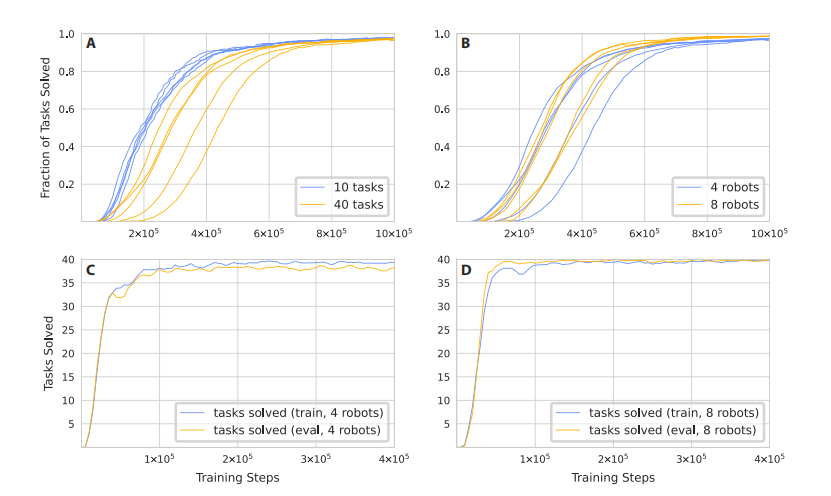
多机器人轨迹规划 DeepMind新作登Science子刊
- by wittx 2025-09-28
用户发布的文档
加载速度比较慢比较慢,请稍等,手机环境下,有可能无法显示!
" width="100%" height="800">
Motion Planning
Share Http URL: http://www.wittx.cn/get_news_message.do?new_id=1496

Best Last Month

Information industry
by wittx

Information industry
by wittx
Traffic
by wittx
Information industry
by wittx
Information industry
by wittx
Information industry
by wittx

Information industry
by wittx

Information industry
by wittx
Information industry
by wittx
Probabilistic Inference in Language Models via Twisted Sequential Monte Carlo